


The MR-20118 Micro Digital Servo Motor is a compact and lightweight actuator designed for robotics, RC models, and embedded control applications. It features a metal gear transmission, PWM control interface, and 180° rotation capability for precise motion control.
With its compact 9g-class design and durable copper gears, the MR-20118 provides reliable performance for small robotic mechanisms, pan-tilt systems, and automation projects.
Key Features
-
Compact micro servo motor
-
Metal gear transmission for durability
-
180° rotation control
-
PWM control interface
-
JR compatible connector
-
Lightweight 12.7 g design
-
Suitable for robotics, RC models, and automation systems
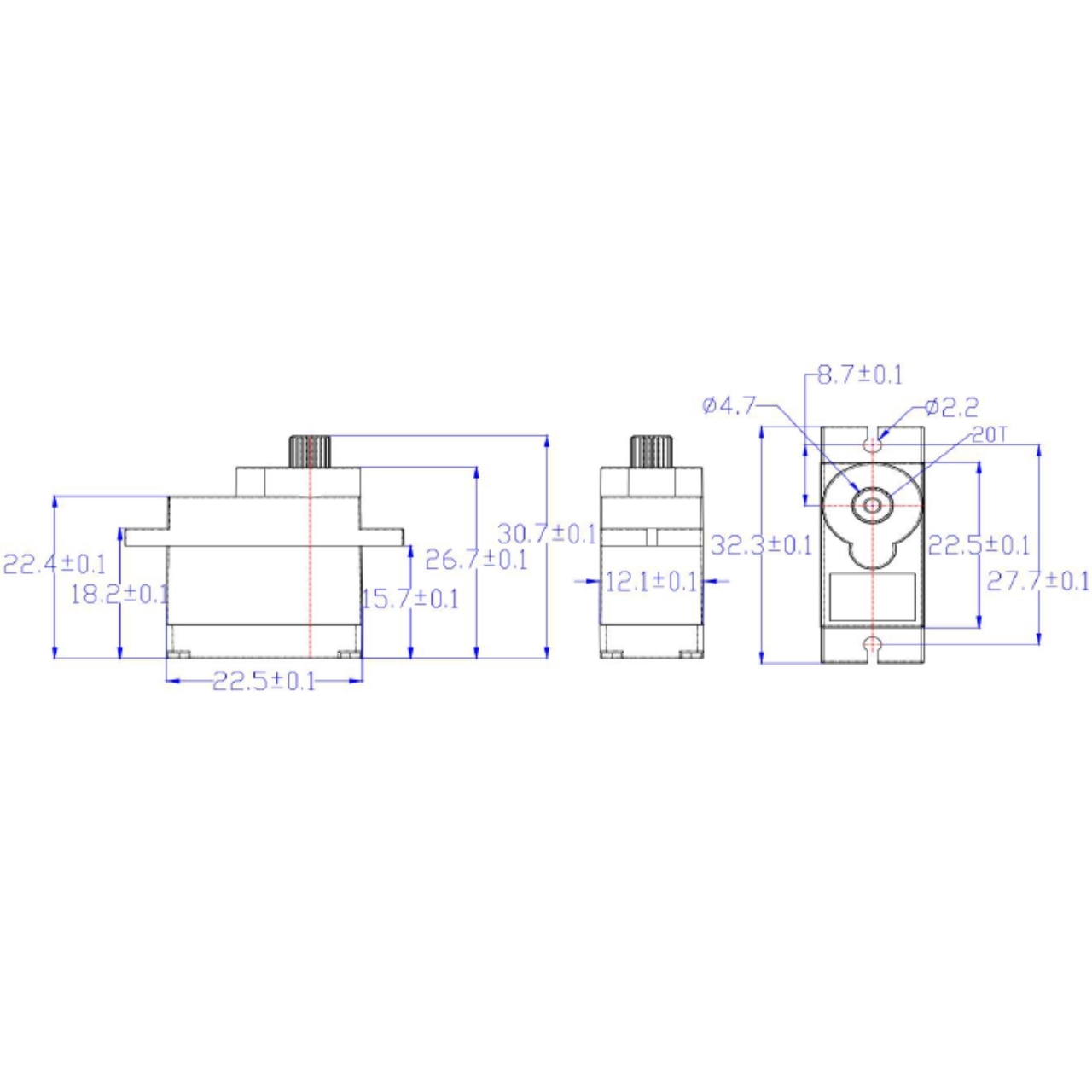
Mechanical Specifications
-
Dimensions: 22.5 × 12.1 × 26.7 mm
-
Weight: 12.7 g ±1 g
-
Case Material: PC Plastic
-
Gear Material: Copper
-
Gear Ratio: 1:263
-
Horn Type: 20T / 4.7 mm
-
Cable Length: 25 cm
-
Connector Type: JR
-
Backlash: 2°
-
Motor Type: Core Motor
Control Specifications
-
Control Signal: PWM
-
Signal Period: 20 ms
-
Pulse Width Range: 500 µs – 2500 µs
-
Neutral Position: 1500 µs
-
Dead Band Width: 8 µs
-
Rotation Direction: Counterclockwise (1500 → 2000 µs)
Connector Pinout
| Pin | Name | Description |
|---|---|---|
| 1 | Signal | PWM control signal |
| 2 | VCC | Power supply (3.3V – 6V) |
| 3 | GND | Ground |
Applications
-
Robotics projects
-
RC vehicles and aircraft
-
Pan-tilt camera systems
-
Automation mechanisms
-
Educational robotics kits
-
Embedded control systems
Package Includes
-
1 × MR-20118 Micro Digital Servo Motor
-
Servo horn set
-
Mounting screws
FAQ
What control signal does the MR-20118 servo use?
The servo uses a PWM (Pulse Width Modulation) signal with a 20 ms period.
What is the rotation range?
The servo supports up to 180° rotation.
What voltage can power the servo?
It operates between 3.3V and 6V.
What torque does the servo provide?
At 6V, it provides up to 2.2 kg·cm stall torque.
Is it suitable for Arduino?
Yes, the MR-20118 can be easily controlled using Arduino, ESP32, Raspberry Pi, or other microcontrollers with PWM outputs.




